 pressure-tolerant
brushless DC
motor controllers
pressure-tolerant
brushless DC
motor controllers
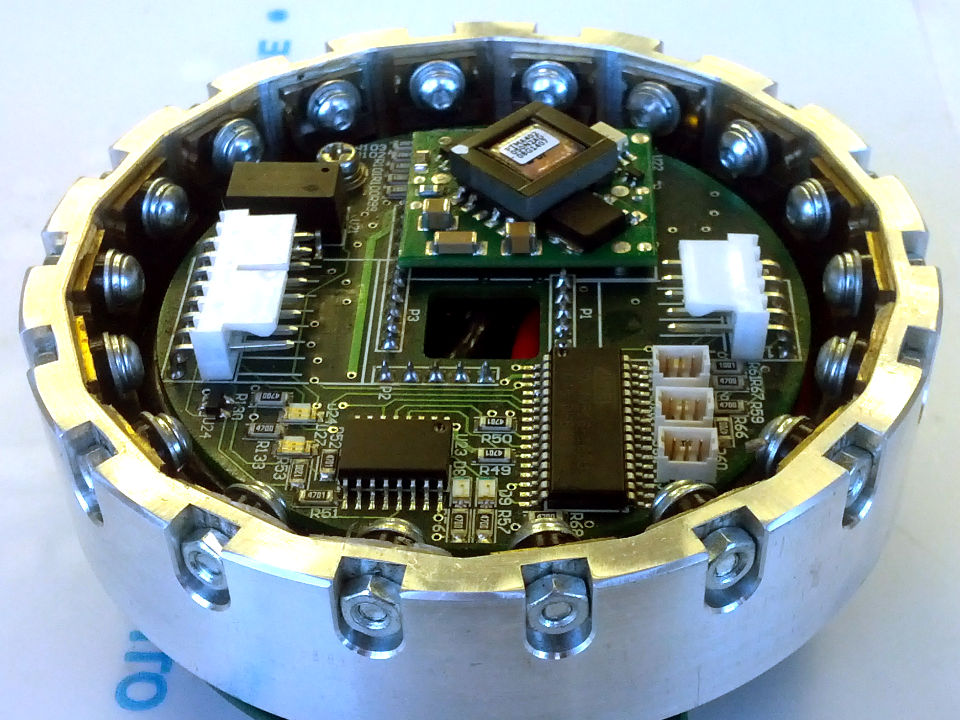
UUdrive is the only 11,000m depth-rated, pressure-tolerant motor controller of its class: a compact and light-weight, three-phase variable frequency drive for permanent magnet motors.
In addition to obvious buoyancy advantages, zero implosion risk, and elimination of high-pressure seals, installing a pressure-tolerant motor controller inside the motor housing has maintenance and fault-tolerance benefits over traditional in-air solutions. The controller and motor assembly can be tested and serviced as a unit, and external cabling and connectors for the high-current motor windings, position, and temperature sensors are eliminated.
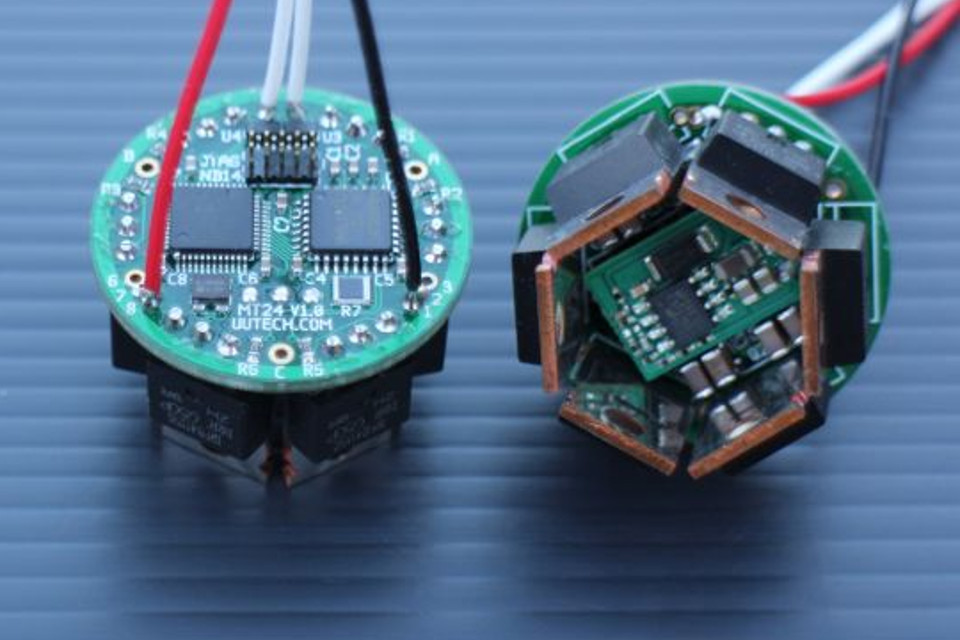
Building on the success of its predecessor, which was used to drive all thrusters and hydrualic pumps on James Cameron's Deepsea Challenger submersible, this second-generation design supports higher DC bus voltages and offers additional control and feedback options. The same design has also been demonstrated in rotary actuators, suction samplers, and other applications.
The unique ring heat sink arrangement is ideally suited for a sliding fit inside an aluminium motor housing, though other mounting arrangements are possible. Exposed components are compatible with most mineral oils, silicone fluids, and fluorinated liquids. Thermal expansion during operation ensures good heat conduction through the housing to seawater.
Ready-to-run evaluation systems including a UUdrive controller, example motor, precharge switch, USB PC interface, and control software are available now. We are also in the process of making complete thrusters based on this technology available through our integration partners. Contact Unmanned Underwater Technology for more information, or to discuss your application schedule.
| Controller power | 10kVA continuous (subject to cooling) |
| Controller efficiency | > 98% for typical operating modes |
| Motor suitability | Three-phase permanent magnet motor w/ rotor position sensors (sensorless option available) |
| Maximum DC bus voltage | 100V (200V option available) |
| Maximum motor current | 100A RMS |
| Communications interface | RS-485 (Modbus protocol) CANbus (CANopen protocol) |
| Control and feedback | Motor speed and current Controller temperature |
| Depth rating | Design depth 11,000m (~110MPa) Test pressure 120MPa (~12,000m) |
| Physical dimensions | 88.9mm (3.5") diameter 50.8mm (2.0") height |
| Weight | 300g in air 170g in water |
(C) 2013 Unmanned Underwater Technology